
Scanse LiDAR
2 mins read.So I spent today helping out with plotting the output of the Scanse LiDAR sensor.
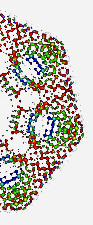
This LiDAR sensor can take readings up to 40 meters, and could be used in projects ranging from self-driving cars to home security systems. I helped out a team by taking the output of the sensor and feeding this into Python with the goal of creating real-time plots. I thought it might be a good opportunity to make a quick ‘n’ dirty video:
The data comes from a C file, and is piped into the Python code below:
import matplotlib.pyplot as plt
import math
import re
##plot angle and distance on polar plot
def plotter(new_angle, new_distance):
fig = plt.figure(figsize=(8,8))
angle = math.radians(new_angle)
ax = fig.add_subplot(111, projection='polar')
ax.set_theta_zero_location('N')
ax.set_theta_direction(-1)
ax.scatter(angle, distance, cmap='hsv', alpha=0.75)
##reading file from pipe input
try:
creader = open('/home/stem/Stem/datadump', 'r') #ENTER FILE
except IOError:
print('The file does not exist')
else:
print("File exists!")
info = creader.read()
info = re.split ('A|D|\n', info)
angle, distance = float(info[1]), int (info[2])
plotter(angle, distance)We noticed that the plots don’t quite match the environment, so we’ll be applying Kalman filtering to smooth the data. A future implementation will be to calculate the velocity of moving objects in the environment and then connecting this all up to an embedded device.